Hexacopter Hardware
This blog post is mostly about building a Hexacopter and setting up the Navio2 board with a Raspberry Pi 3 Model B.
The hardware involved with creating the frame:
- Turnigy Talon Hexacopter Frame V2 (625mm diameter)
- 6 Motors (Turnigy Multistar 3525 850kv 14 pole outrunners)
- 6 Turnigy MultiStar 30A BLHeli-S Rev16 V3 ESC 2~4S (Opto) (Electronic Speed Controllers)
- FrSky XJT 2.4Ghz Combo Pack For JR W/ Telemetry Module & X8R 8/16Ch S.BUS ACCST Telemetry Receiver
- Navio 2 Hat with Raspberry Pi 3 Model B
- Turnigy 9x Radio
- Multistar High Capacity 3S 4000mAh Multi-Rotor Lipo Pack
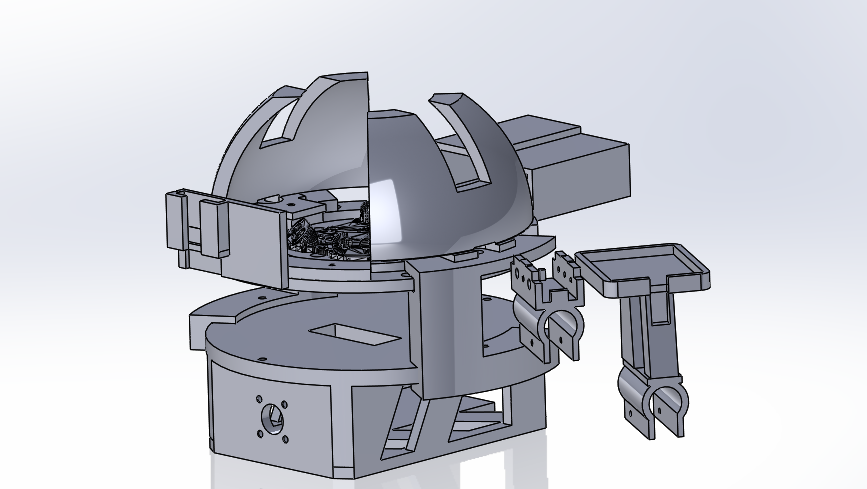
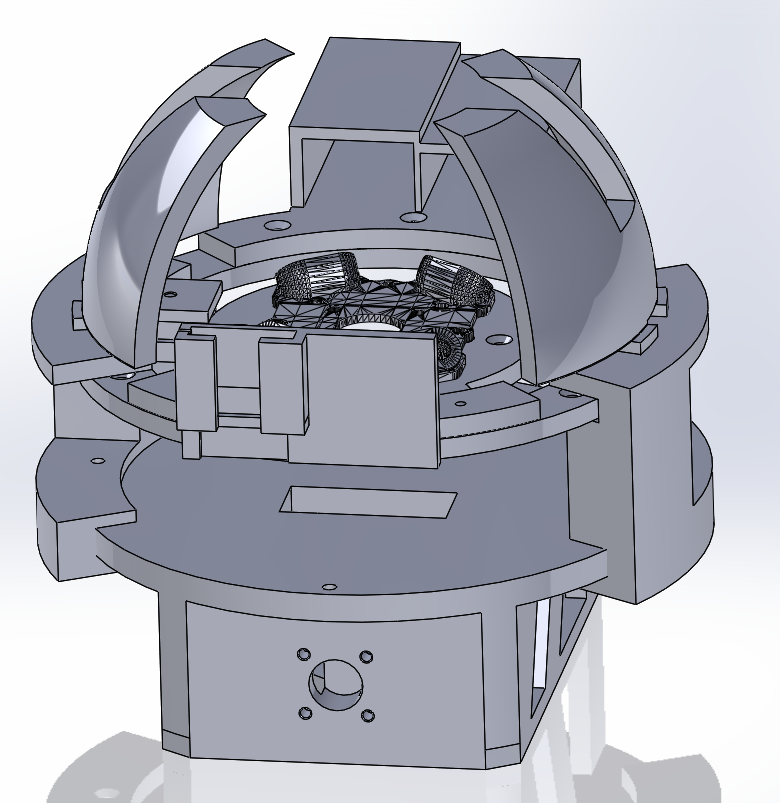
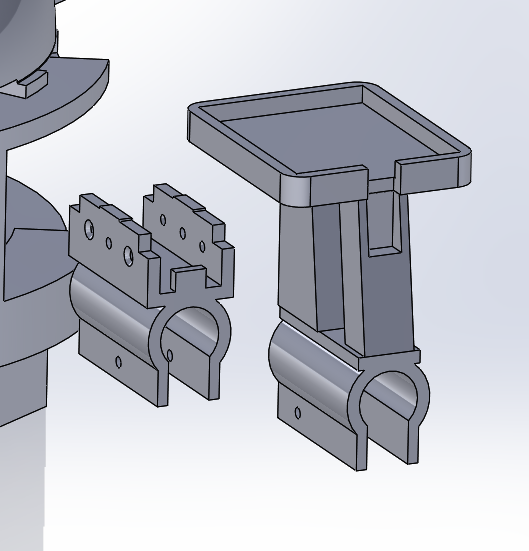
Modular Hexacopter Add-Ons to facilitate carrying equipment and carrying batteries.
Setting up the hardware:
- Putting it all together
- Navio2 + Raspberry Pi Setup
- Calibration
- Writing Scripts
Github Repository